试题分析:杠杆处于静止状态或匀速转动状态都称为平衡状态;如果杠杆不在水平位置平衡,可通过反向调节(向偏高的一端)平衡螺母,使杠杆在水平位置平衡;从支点到动力作用线的垂直距离叫动力臂;从支点到阻力作用线的垂直距离叫阻力臂.杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂(重力的方向跟杠杆垂直),同时能够消除杠杆自身重力对杠杆平衡的影响;先确定两边力臂大小关系,再由杠杆的平衡条件来判断,力臂越短的那边大树重力大.
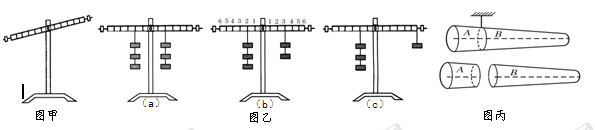
(1)实验前,杠杆停在图甲所示的位置,此时杠杆处于静止状态,是平衡状态;
当杠杆的左端偏低时,可将两端的平衡螺母向右调节;
(2)“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,也就是实验过程中没有改变动力或阻力的方向.为了便于从杠杆上直接读取力臂,同时消除杠杆自身重对杠杆平衡的影响,在进行实验时应该使杠杆在水平位置平衡;
(3)在图乙(b)装置的左右两边各取下一个钩码后,左端的力和力臂的乘积大于右端的力和力臂的乘积,杠杆左端下沉,为使杠杆恢复水平平衡,只需将右侧钩码移至第4格;
(4)将大树以悬挂点点O分为左右两部分;根据杠杆平衡条件:F
1L
1=F
2L
2,由题意可得:G
左L
左=G
右L
右,因物体的重心在物体的几何中心,则杠杆示意图如图:

由图知:L
左<L
右,所以G
左>G
右;即G
A>G
B.