你思考过“人在水平路面上前进时是否要克服重力做功”这一问题吗?如图所示,小文同学对此进行了研究。有关测量数据记录在下表中(表中的步距是指跨出每一步两脚之间的距离;重心-九年级物理
 求出,克服重力做功等于重力与高度的乘积,即
求出,克服重力做功等于重力与高度的乘积,即 ,总功率可以通过所做的总功和时间利用功率公式
,总功率可以通过所做的总功和时间利用功率公式 求得。
求得。(1)
 0.24m/s
0.24m/s(2)

(3)

例2在打捞海底沉船时,常用水下机器人潜入水下打捞船上物品,已知ρ海水=1.03×103kg/m3。
(1)机器人在水下70m处受到海水产生的压强是多大?
(2)某时刻机器人在水下用竖直向上的力举着体积为0.02m3,密度为2.7×103kg/m3的物体静止不动,求该力的大小。
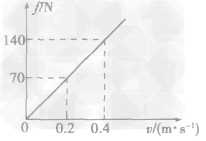
(3)若机器人在水下运动时,所受海水阻力与速度的关系如图所示,求机器人在水下以0.5m/s的水平速度匀速运动时,机器人水平推进力的功率。
解析:(1)由液体压强公式
 得,
得, ,
,
(2)物体在水下受平衡力的作用,则

则



(3)由题图可知,海水阻力与机器人的运动速度成正比,当机器人运动速度为0.5m/s时,f=175N 机器人匀速前进时,机器人水平推进力F=f
P=Fv=175N×0.5m/s=87.5W
答案:(1)7.21×105Pa(2)334N(3)87.5W
考点名称:杠杆的平衡条件
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
- 最新内容
- 相关内容
- 网友推荐
- 图文推荐
![将下图所示的长方体,从中间切开变成完全相同的两块,并将一块按照图中所示放在另一块的上面。若长方体放在水平桌面上,则长方体对桌面的前、后两次压强之比P1∶P2为[]A、1∶1-八年级物理](http://www.00-edu.com/d/file/ks/wuli/1/118/2020-05-27/678b8740a9b334137d65f7a73524e729.gif)




| [高考] 2022 西安电子科技大学《软件工程》大作业答案 (2022-04-25) |
| [家长教育] 孩子为什么会和父母感情疏离? (2019-07-14) |
| [教师分享] 给远方姐姐的一封信 (2018-11-07) |
| [教师分享] 伸缩门 (2018-11-07) |
| [教师分享] 回家乡 (2018-11-07) |
| [教师分享] 是风味也是人间 (2018-11-07) |
| [教师分享] 一句格言的启示 (2018-11-07) |
| [教师分享] 无规矩不成方圆 (2018-11-07) |
| [教师分享] 第十届全国教育名家论坛有感(二) (2018-11-07) |
| [教师分享] 贪玩的小狗 (2018-11-07) |
