ͼ���Ǻ�����ѧ�Ƽ�С����ƵĴ���ˮ�������װ��ʾ��ͼ��DB����
(2)�������ù����ܹ�����ռ�ı������ڶ�����������£��������ù��Ĵ�С��
(3)������Ļ�е��
�������еЧ���й����أ�
1�����������������GԽ��еЧ��Խ�ߡ�
2���������أ����������Խ�࣬��Ȼʡ���������ù��࣬��еЧ��ԽС��
3�����뻬��֮���Ħ����
�����أ�1�����߷�ʽ��2�����屻��ߵľ��룬3����������ٶȡ�
�������ƣ����ʵļ��㹫ʽ��Ӧ��
��λʱ������ɵģ��������ʣ���ʾ���������̶ȵ���������ͨ����P��ʾ���ʹ��ʵ����������������������ٶȵı�������
���ʵļ��㹫ʽ����λ
�繦�ʼ��㹫ʽ��P=W/t =UI;�ڴ������·�У�����ŷķ����U=IR����P=UI�л����Եõ���P=I²R=(U²)/R��
�ڶ���ѧ�У����ʼ��㹫ʽ��1.P=W/t(ƽ������)2.P=FV;P=Fvcosa(˲ʱ����)
��ΪW=F(f��)×S(sλ��)(���Ķ���ʽ)���������ʵĹ�ʽҲ���Ƶ���P=F·v��P=W /t=F*S/t=F*V(�˹�ʽ����������������ֱ���˶�)
���ʵ�λΪ���أ����“��”��������“W”��W��ʾ������λ��“����”�����“��”��������“J”��“t”��ʾʱ�䣬��λ��“��”��������“s”��
���ʼ��㹫ʽ��Ӧ��
��1���øܸ�����һ��Ϊ2400 N�Ĵ�ʯ�飬������5 s����300 N�������ܸˣ����ܸ�һ��ѹ��1.6 m����ʯ�鱻�ٸ߶���m?�������Ĺ���Ϊ���?(���Ƹܸ˵�������Ħ��)
˼·������(1)������Ĺؼ����ܹ��뵽����ԭ����������ͬѧ���øܸ�ԭ���������⣬�������ִ����ͬѧ��Ҫ��û����ȷ����ʲô�����ۣ����и�����1.6 m�Ƕ����ض����ķ���ͨ���ľ��룬�����Ƕ����ۣ�����Ҫ��Ĵ�ʯ�鱻�ٸߵĸ߶�ǡ�þ�����������������ͨ���ľ��롣�˶Ըܸ����Ĺ��������Ըܸ����Ĺ�W1=Fs=300 N×1.6 m=480 J(ע�⣺F��s��Ӧ)�����ݹ���ԭ����W1=W2��
W2=G��h=2400 N×h. 480 J=2400×h����ã�h=0.2 m��
(2)�������Ĺ��ʾ��Ƕ��������Ĺ���Ϊ96 W��
����ָ�������øܸ�����ʱ���ڸܸ�ƽ���ʱ���ݹ���ԭ���ܸ�ԭ����
��2�����ڹ������ʣ�����˵����ȷ����[ ]
A.��е��Ч��Խ�ߣ�����Խ��
B.��е��Ч��Խ�ߣ�����Խ�쪥
C.��е�Ĺ���Խ������Խ�થ
D.��е�Ĺ���Խ������Խ�쪥
˼·�����������DZ�ʾ�����Ŀ������������������ٵ�����������еЧ���DZ�ʾ���ù����ܹ��еı�ֵ���������Ķ��ټ����ʵĴ�С�أ����Ա������ȷ��ΪD��
����ָ���������Ŀ�������������ݵ�������Ҫ�ĸ���������ʡ���еЧ�ʣ�ֻ��������������Щ�������ȷ���������⡣
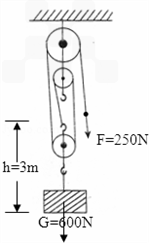
��3������Ϊ30 kW����еЧ��Ϊ60%��ˮ�ã�1 h���ܰѶ���t��ˮ��100 m��Ŀ��г鵽���棿��gȡ10 N/kg)��
˼·����������ȿ����˹������ʡ�ʱ��Ĺ�ϵ���ֿ������ܹ������ù��ͻ�еЧ�ʵĹ�ϵ������ˮ�õĹ��ʣ�����ʱ���������������ܹ�W��=Pt���������ù����ܹ�����еЧ�ʵĹ�ϵ����������ù�W��=W��η��������ù������壬������ˮ�ö�ˮ�����Ĺ��������ù�����W��=Gˮh�������Ϳ������ˮ�����������������£�
W��=Pt=3×104 W×3600 s=1.8×108 J
W��=W��η=1.08×108 J×0.6=6.48×107 J��ע�ⵥλʱͳһ��
W��=Gˮh
Gˮ=6.48×105 N
mˮ=6.48×104 kg=64.8 t
����ָ��������������������֪������ȷ��Ҫѡ�õĹ�ʽ��ͬһ������������ͨ���ö�;���������Ҫ�����ǰ�ѧ����֪ʶҪ�ܽ�������ϵ��һ������������ã��ڻ��ͨ��
�������ƣ��ܸ˵�ƽ������
�ܸ˵�ƽ��������
�ܸ˵�ƽ�������ǣ�����X������=����X������
��
���ƽ������Ҳ���ǰ����·��ֵĸܸ�ԭ����
����Ĺ�ϵʽҲ����д���������ʽ��

�ܸ˵Ķ��壺
ֻҪ�������������ܹ���֧�ŵ�ת���ļ�ʵ���嶼�Ǹܸˡ����ΰ塢���������ӡ��˰��ȣ����Ǹܸˡ�
�ܸ˵���Ҫ�أ�
��1���ܸ�ת��ʱ���ŵĹ̶����֧�㣻
��2��ʹ�ܸ�ת�������ж�����
��3���谭�ܸ�ת��������������
��4����֧�㵽���������ߵľ���ж����ۣ�
��5����֧�㵽���������ߵľ���������ۣ�
�ܸ˵�ԭ����
����Ŀ�����ص��ܸ˴��ھ�ֹ״̬������ת��״̬ʱ���ܸ˾ʹ���ƽ��״̬��
�ܸ˵�ƽ������:����×������=����×������
����ĸ��ʾ���ǣ�F1×L1=F2×L2
�ܸ˵�ƽ�������ֽиܸ�ԭ�����ǰ�������������ġ��ݴ��������˸���һ��֧�㣬�ҿ����˶����ĺ���׳�
�ܸ˵ķ��ࣺ
һ�ࣺ֧���ڶ��������������м䡣��Ϊ��һ��ܸˡ��ȿ���ʡ���ģ�Ҳ���ܷ����ģ���Ҫ��֧���λ�þ���������˵�ɱ۵ij��Ⱦ������������ΰ壬����������������ú��������ģ����Ƴ���Ь���ӣ��������˶����ֵȡ�
���ࣺ�������ڶ������֧���м䡣��Ϊ�ڶ���ܸˡ����ڶ��������Ǵ��������ۣ���������ʡ���ܸˡ�����������ӣ��ţ����������ˮ�壬���֣�����ơ�ƣ�ƿ��������ˮ�ࡢש�ģ����Ƴ���
���ࣺ��������֧���������֮�䡣��Ϊ������ܸˡ��ص��Ƕ����۱������۶̣���������ܸ��Ƿ����ܸˣ�Ȼ���ܹ���ʡ���롣�������ӣ��ֱۣ���ͣ�Ƥ��ͧ�Ľ������¡�ɨ�㡢�������һ��Ϊ֧�㣬һ��Ϊ��������е��
���⣬����������Ĺ���Ҳ����һ�ֱ��θܸˡ�������������ڵ�һ��ܸ˵Ķ����������ܣ��������ĺñ�֧�㣬��������������ñȸܸ˵�����ʩ���������������һ��������Բ��ʩ���ۺ������۽Խ���Բ�İ뾶��
���øܸ�ƽ�������������ͼ����й����⣬һ����ѭ���²��裺
(1)ȷ���ܸ�֧���λ�á�
(2)����ܸ��ܵ��Ķ�������������ȷ���С�ͷ��������ܵ���������ʾ��ͼ��
(3)ȷ��ÿ���������ۡ�
(4)���ݸܸ�ƽ�������г���ϵʽ��������⡣
- ��������
- �������
- �����Ƽ�
- ͼ���Ƽ�


| [�߿�] 2022 �������ӿƼ���ѧ���������̡�����ҵ�� (2022-04-25) |
| [�ҳ�����] ����Ϊʲô���ĸ�������룿 (2019-07-14) |
| [��ʦ����] ��Զ������һ���� (2018-11-07) |
| [��ʦ����] ������ (2018-11-07) |
| [��ʦ����] �ؼ��� (2018-11-07) |
| [��ʦ����] �Ƿ�ζҲ���˼� (2018-11-07) |
| [��ʦ����] һ����Ե���ʾ (2018-11-07) |
| [��ʦ����] ��ز��ɷ�Բ (2018-11-07) |
| [��ʦ����] ��ʮ��ȫ������������̳�иУ����� (2018-11-07) |
| [��ʦ����] ̰���С�� (2018-11-07) |
