如图所示,在建筑工地上有一台塔式起重机,其部分技术参数如下表
测量滑轮组的机械效率:
①器材:弹簧测力计、刻度尺、滑轮组
②原理:
③步骤:先用弹簧测力计测出物体的重力G,再按要求组装滑轮组,用弹簧测力计提起绳端匀速上升,测出作用于绳端的作用力F,确定重物和绳自由端的始、末位置,用刻度尺测出物体上升的距离h和绳子末端移动的距离s,再用公式求出滑轮组的机械效率η ;
④注意事项:一是要用弹簧测力计提起绳端匀速上升,二是要让绳端竖直上升。
提高滑轮组机械效率的方法:
1.影响滑轮组机械效率的因素
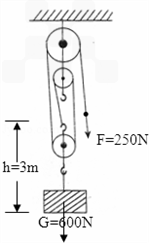
滑轮组是人们经常使用的简单机械,用同一滑轮组提升物体G升高h时,滑轮组对物体做的功为有用功,而人对滑轮组的拉力F做的功为总功,F移动的距离s=nh(n为与动滑轮相连绳子的段数),则滑轮组的机械效率:

若不计摩擦力,而动滑轮的重为G’,那么提升动滑轮做的功就是额外功,则滑轮组的机械效率还可表示为

讨论这个表达式可知,对于同一滑轮组(G’一定),提升重物越重,滑轮组的机械效率越高;而提升相同重物时,动滑轮越少、越轻的滑轮组,机械效率越高。
2.提高滑轮组机械效率的方法
(1)减小额外功在总功中占的比例。可采取改进机械结构、减小摩擦阻力等方法。如可使滑轮组在满载情况下工作,以增大有用功在总功中的比例,在滑轮的转轴中加润滑油,以减小摩擦阻力,或减小滑轮组中动滑轮的自重等,即在有用功一定的情况下,减小额外功,提高效率。
(2)增大有用功在总功中所占的比例,在额外功不变的情况下,增大有用功的大小。
(3)换用最简单的机械。
滑轮组机械效率有关因素:
1、被提物体的重量,G越大,机械效率越高。
2、滑轮自重,滑轮组如果越多,虽然省力但是无用功多,机械效率越小。
3、绳与滑轮之间的摩擦。
无关因素:1、绕线方式,2、物体被提高的距离,3、提物体的速度。
考点名称:电功率的计算
电功率的计算:
电灯电器有标志,额定电压(U0)额功率(P0)。
正常发光用电流,I等P0除U0.I=P0/U0.
电压改变功率变,其中电阻是不变。
遇见电器求电阻,R等U2除以P,R=U2/P.
电功率的四个表达式:(1)定义式:P=W/t。(2)反映电学特点的普适式P=UI。与欧姆定律结合后得到的(3)式P=I2R。(4)式P=U2/R。
电功率计算同类试题:
同类试题1:
某灯泡甲上标有“PZ220-40”的字样,“PZ”表示普通白炽灯,正常发光时工作电流是____0.18A.若将它与“220V 60W”的灯泡乙串联接入照明电路,两灯工作时,较亮的是____甲灯 (填“甲”或“乙”).
解:灯泡甲正常发光时工作电流为I=PU=40W220V≈0.18A;根据R=U2P可知,额定电压相同时,甲灯泡的额定功率小,电阻大;当两灯泡串联时,通过的电流相等,由P=I2R可知,甲灯泡电阻大,实际功率就大,故灯泡较亮.故答案为:0.18;甲.
同类试题2:
在一个标有“PZ220-60”的白炽灯的两端加上220V电压,灯泡消耗的实际功率为____60W;而如果电压换成110V,灯泡消耗的实际功率又为____15W.
解:(1)白炽灯的两端加上220V电压,因U实=U额,则灯泡正常发光时,所以,P实=P额=60W;(2)解:已知灯泡的额定电压是220V,额定功率是60W,灯泡的电阻值: R=U2额P额=(220V)260W=807Ω;灯泡的实际功率:P=U2实际R=(110V)2807Ω=15W.故答案为:60;15.
1.将一灯泡直接接到电源上,灯泡的功率为100W;将此灯泡与一个电阻串联后接到同一电源上,灯泡的功率为36W,则电阻上的功率是2424.....
2.如图所示电路,电阻R1=60Ω,灯L上标有“10V 2W”字样,且灯丝电阻不随温度变化.开关S闭合时,灯L恰能正常发光,.....
3.如图所示为电饭锅的原理图,当控制开关闭合时电饭锅处于加热煮饭状态,此时功率为1000W,饭熟后,控制开关自动断开,电饭锅处于保温状.....
4.一个标有“220V、300W”的电烫斗,如果电源电压在10%的范围内波动,则实际功率在243243~363363瓦特内变动...
5.小明家有一只电暖器,上面标有“220V 110W”字样.当电暖器正常工作时,通过电热丝的电流是0.50.5A.若这只电暖.....
6.照明电路中甲、乙两盏白炽灯均正常发光,甲灯比乙灯亮一些,则灯丝电阻较大的是乙灯乙灯;若将这两盏灯串联在照明电路中,它们中较亮的是乙.....
7.小红家新购买了一台标有“220V 1000W”字样的电热器,他想借助家中的电能表测一测该电热器的实际功率,他.....
8.在家庭电路中,只让一个用电器正常工作1h,能使标有3000r/kW?h的电能表表盘转动1500r,则此用电器所消耗的电能为0.50.....
考点名称:杠杆的平衡条件
杠杆的平衡条件:
杠杆的平衡条件是:动力X动力臂=阻力X阻力臂
或
这个平衡条件也就是阿基米德发现的杠杆原理。
上面的关系式也可以写成下面的形式:

杠杆的定义:
只要在力的作用下能够绕支撑点转动的坚实物体都是杠杆。跷跷板、剪刀、扳子、撬棒等,都是杠杆。
杠杆的五要素:
(1)杠杆转动时绕着的固定点叫支点;
(2)使杠杆转动的力叫动力;
(3)阻碍杠杆转动的力叫阻力;
(4)从支点到动力作用线的距离叫动力臂;
(5)从支点到阻力作用线的距离叫阻力臂.
杠杆的原理:
主条目:力矩当杠杆处于静止状态或匀速转动状态时,杠杆就处于平衡状态。
杠杆的平衡条件:动力×动力臂=阻力×阻力臂
用字母表示就是:F1×L1=F2×L2
杠杆的平衡条件又叫杠杆原理,是阿基米德最早提出的。据此他发出了给我一个支点,我可以撬动地球。的豪言壮语、
杠杆的分类:
一类:支点在动力点和阻力点的中间。称为第一类杠杆。既可能省力的,也可能费力的,主要由支点的位置决定,或者说由臂的长度决定。例:跷跷板,剪刀,船桨,(运煤气罐等重物的)手推车,鞋拔子,塔吊,撬钉扳手等。
二类:阻力点在动力点和支点中间。称为第二类杠杆。由于动力臂总是大于阻力臂,所以它是省力杠杆。例:坚果夹子,门,钉书机,跳水板,扳手,开(啤酒)瓶器,(运水泥、砖的)手推车。
三类:动力点在支点和阻力点之间。称为第三类杠杆。特点是动力臂比阻力臂短,所以这类杠杆是费力杠杆,然而能够节省距离。例:镊子,手臂,鱼竿,皮划艇的桨,下颚,锹、扫帚、球棍等以一手为支点,一手为动力的器械。
另外,像轮轴这类的工具也属于一种变形杠杆。就拿最简单、相似于第一类杠杆的定滑轮来介绍,滑轮轴心好比支点,两端物体的拉力好比杠杆的两端施力,而如果滑轮是一个完美的圆,施力臂和阻力臂皆将是圆的半径。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
- 最新内容
- 相关内容
- 网友推荐
- 图文推荐


| [高考] 2022 西安电子科技大学《软件工程》大作业答案 (2022-04-25) |
| [家长教育] 孩子为什么会和父母感情疏离? (2019-07-14) |
| [教师分享] 给远方姐姐的一封信 (2018-11-07) |
| [教师分享] 伸缩门 (2018-11-07) |
| [教师分享] 回家乡 (2018-11-07) |
| [教师分享] 是风味也是人间 (2018-11-07) |
| [教师分享] 一句格言的启示 (2018-11-07) |
| [教师分享] 无规矩不成方圆 (2018-11-07) |
| [教师分享] 第十届全国教育名家论坛有感(二) (2018-11-07) |
| [教师分享] 贪玩的小狗 (2018-11-07) |
