濠电姵顔栭崰妤呮晪闂佸鏉垮閸楅亶鏌熼梻瀵稿妽闁稿孩鍨块弻娑滅疀閺囩偛浠橀梺姹囧妿閸嬫挻绌辨繝鍥舵晬闁挎繂瀚崐锝囩磽娴d粙鍝虹紒璇插缁傛帡鏁傞懞銉хФ闂侀潧脿閳ь剟鏁冮崒娑氬幗濡炪倕绻愮€氬嘲危閹间焦鐓曢柕蹇ョ磿閸欌偓闂佺娅曞ú鏍綖濠靛唯闁靛繒濮虫竟鏇㈡⒑缁嬫寧婀板〒姘殜瀹曟洖顫滈埀顒€顫忔繝姘<闁靛牆鎳忛悘鏇烆渻閵堝啫鐏柛銊ュ缁顓兼径濠佺炊闂佸憡娲﹂崑鍡涱敊瀹€鍕拻濞撴艾娲ゅ璺ㄧ磽瀹ヤ礁浜剧紓鍌欑劍濮婂宕伴弽顓炴瀬鐎广儱顦伴崑鍕煟閹寸偍缂氶柣锝嗗▕濮婂搫煤鐠佽櫕鎹i梺绋款儐閸旀洟鍩㈤弮鍫濈厸闁告侗鍠栭崜顕€姊洪崜鎻掍簼缂佽绉村嵄闂侇剙绉甸悡蹇涙煕閳╁喚娈旈柍褜鍓濋~澶愬疾閸洘鍋愰柧蹇e亜瀵潡鏌f惔顖滅У闁哥姵甯″畷鎴﹀箻鐎涙ê顎撻柣鐔哥懃鐎氬懎顫濇潏銊ユ瀾闂佺粯顨呴悧鍡涙煂濠婂懐纾奸弶鍫涘妿缁犵偟鈧娲╃紞浣哥暦婵傜ǹ唯闁靛繒濮虫竟鏇熺箾鏉堝墽鍒伴柟璇х節瀹曟垵螣閸忕厧鏋戦梺缁橆殔閻楀棛绮幒鎿冩闁绘劕鐡ㄥ畷灞解攽閳╁啯灏︾€规洘甯掗埞鎴﹀幢閳衡偓閹寸兘姊绘担鍛婂暈閻㈩垳鍋為弲璺何旈崨顔煎壍濠电偛妫欓幐鍝ユ兜閳ь剙鈹戞幊閸婃洜鈧凹鍓熷畷瑙勬媴缁洘顫嶉梺鐟板⒔椤掓煡寮ㄧ紒妯圭箚鐎瑰壊鍠栨晶鎾煛娴e摜肖濞寸媴绠撻幐濠冨緞瀹€瀣婵犵數鍋為崹鍫曞箰缁嬫5娲Χ婢跺﹦顔嗘繛鏉戝悑濞兼瑩宕f繝鍥ㄧ厪濠㈣泛鐗嗛埀顒侇殘缁棃宕奸弴鐔哄帾闂佺硶妲呴崢鐣屸偓姘炬嫹
(1)某小组研究“杠杆的使用特点”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点。实验中,在杠杆P点上挂三个相同的钩码,先后四次用弹簧测力计在Q位置

◎ 题目
| (1)某小组研究“杠杆的使用特点”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.实验中,在杠杆P点上挂三个相同的钩码,先后四次用弹簧测力计在Q位置沿不同方向向下拉杠杆,如图甲中A、B、C、D 所示,每次都能使杠杆在水平位置平衡.若以测力计的拉力为动力F1,钩码对杠杆的作用力为阻力F2,“动力的方向”用QR连线与测力计拉力方向所组成的夹角θ表示,且0°<θ≤90°.请仔细观察图甲中的操作和测量结果,然后归纳结论 |
 |
| ①实验前,应先调节杠杆在_________.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出_________.调节时,如发现杠杆左端偏高,应如何操作:_________. ②分析比较图甲(A)、(B)与(D)的操作和弹簧测力计指针的位置,可得到的初步结论:阻力、阻力臂一定时,动力随动力臂增大而_________(选填:增大或减小). ③分析比较图甲(A)、(B)、(C)和(D)的动力F1的大小与动力方向之间的关系,可得到的初步结论:_________. ④某次实验中,用如图乙所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式.这主要是以下哪种原因 |
| [ ] |
| A.一个人无法独立操作 B.需要使用太多的钩码 C.力臂与杠杆不重合 D.力和力臂数目过多 |
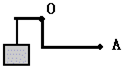
| (2)如图丙所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一个“拉力﹣﹣位移传感器”竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图丁所示.由图可知金属杆重_________N. |
 |
◎ 答案
| (1)①水平;力臂;平衡螺母向左调 ②减小 ③θ夹角越小,动力越大.(反之亦对) ④D (2)10N |
◎ 解析
“略”◎ 知识点
专家分析,试题“(1)某小组研究“杠杆的使用特点”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点。实验中,在杠杆P点上挂三个相同的钩码,先后四次用弹簧测力计在Q位置…”主要考查了你对 【杠杆的动态平衡分析】 等知识点的理解和应用能力。关于这些知识点的“档案”,你可以点击相应的链接进行查看和学习。 閻℃帒鎳庣粩鑸电瑹閸喖鐒洪幖瀛樸仦缁楀懘宕¢弴姘卞枠闁诡垽鎷� 婵絽绻愰妵澶嬶紣閸℃绲块柛鎺濆亰閺佸﹥娼婚崶椋庣闁告娲栧畷鐔稿濡鍔曞ù婊庡亗缁楀宕戦敓锟�- 最新内容
- 相关内容
- 网友推荐
- 图文推荐
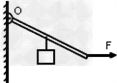
![如图所示,在水平力F的作用下,使硬棒沿逆时针方向匀速转动,在棒与竖直方向的夹角由θ增大到θ'的过程中[]A.拉力F不变,F的力臂变小B.拉力F不变,F的力臂变大C.重力G不变](http://www.00-edu.com/d/file/2022-06-09/23ab50fb0fa7aecd39b37c51aa5cdac4.gif)
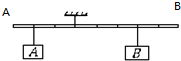
上一篇:有一根长约1m的杠杆,两端分别挂重为50牛物体A和225牛的物体B,那么支点应距A物体那端多少米时,杠杆才能平衡?
下一篇:如图所示,使用杠杆提拉物体时,沿哪个方向施加的力最小[]A.F1B.F2C.F3D.无法判断
零零教育社区:论坛热帖子
| [高考] 2022 西安电子科技大学《软件工程》大作业答案 (2022-04-25) |
| [家长教育] 孩子为什么会和父母感情疏离? (2019-07-14) |
| [教师分享] 给远方姐姐的一封信 (2018-11-07) |
| [教师分享] 伸缩门 (2018-11-07) |
| [教师分享] 回家乡 (2018-11-07) |
| [教师分享] 是风味也是人间 (2018-11-07) |
| [教师分享] 一句格言的启示 (2018-11-07) |
| [教师分享] 无规矩不成方圆 (2018-11-07) |
| [教师分享] 第十届全国教育名家论坛有感(二) (2018-11-07) |
| [教师分享] 贪玩的小狗 (2018-11-07) |

