婵犵數濮甸鏍窗濡ゅ懏鏅梻浣割吔閺夊灝顬堥柛妤呬憾閺岀喖姊荤€电ǹ濡介梺绋垮閸ㄥ潡寮诲☉婊呯杸闁哄洨鍋涙禒姗€姊哄Ч鍥у闁稿鎸荤粚杈ㄧ節閸ヨ埖鏅梺鎸庣箓鐎氼參宕愰敐鍥╃=濞达絼绮欓崫铏圭磼鐠囨彃顏紒鍌涘浮閺佸倿鎳為妷褏肖闂備線娼ц効闁逞屽墴閺佸啴宕掑☉姘箺婵$偑鍊曠换鎰偓姘槻鍗遍柟闂寸劍閻撴洟鏌曡箛銉х?闁告瑢鍋撻梻浣侯攰濞呮洖煤閺嶎叏缍栨繝闈涱儏鍞梺闈涚箳婵櫕绔熼弴銏♀拺缂佸瀵у﹢鏉裤€掑顓ф疁鐎规洘娲栭~婊堝焵椤掆偓椤繑绻濆顒傦紲闂侀潧鐗嗛幊蹇涙倶閺囩儐娓婚柕鍫濆暙閻忣亪鏌涢妸銉ヮ暢缂侇喖顑呴鍏煎緞婵犱胶鐐婇梻浣告啞濞诧箓宕戦崱娑辨晩鐎光偓閸曨兘鎷绘繛鎾磋壘濞层倕顕g捄銊х=鐎广儰绀佹禍鍓х磽閸屾瑧鍔嶆慨濠傤煼瀹曚即寮介鐐寸€悗骞垮劚椤︿即宕戦崟顖涚厽闁瑰鍋嶇紓姘舵煟閿濆棗鈻曟慨濠傛惈鐓ら悹浣芥珪閹癸綁姊虹粙娆惧剱闁告梹娲熼崺銏ゅ籍閸繄鍘搁梺鍛婁緱閸犳牠宕滈鈧娲礈閹绘帊绨肩紓浣筋嚙缁夋潙宓勯梻渚囧墮缁夌敻鎮¤箛娑欑厱闁斥晛鍠氬▓鏃堟煃瑜滈崜婵嬶綖婢舵劕鐤鹃柛顐f礃閸嬫劙鏌ц箛锝呬簻鐎殿喖娼¢弻锝嗘償椤栨粎校闂佸摜濮电敮鈥崇暦閹达箑绠婚悗娑櫭鎾绘煟閻斿摜鎳冮悗姘噹椤繃娼忛妸銉︾€鹃梻浣虹帛椤ㄥ懘鎮ч崱娑欑厒婵犲﹤鎳愮壕濂稿级閸稑濡跨紒鐘靛仧閳ь剝顫夊ú鈺冪礊娴e摜鏆﹀┑鍌溓瑰敮闂侀潧绻掓慨铏珶閺囩喓绠鹃弶鍫濆⒔閸掍即鏌熺拠褏绡€鐎规洘鍨佃灒闁稿繒鍘ч弸鎴︽⒑缂佹﹩娈旈柣妤€妫涚划顓㈠箳閹垮啯顔旈梺缁樺姇閻°劌鐣风仦瑙f斀闁斥晛鍟亸锔锯偓瑙勬礃鐢帡鍩為幋锕€骞㈤柍琛″亾闁瑰鍏樺缁樻媴閸涘﹤鏆堥柣銏╁灣閸嬬偤寮茬捄浣曟棃宕ㄩ鐓庡婵犵數鍋涘Λ娆撳箰閸濄儲鍏滈柍褜鍓欓埞鎴炲箠闁稿﹥娲滈埀顒佸嚬閸撶喎鐣风憴鍕缂侇垱娲橀~宥夋⒑閻熸澘鈷旀い鎺撶叀瀵劎绱掑Ο鍦畾閻庣懓澹婇崰鏍ㄦ櫠閹绢喗鐓涘ù锝呮憸鑲栨繛瀵稿缁犳捇骞愭繝鍐ㄧ窞鐎光偓鐎n剛顦板┑鐘垫暩閸嬬偤宕归崼鏇炵缂佸锛曞ú顏勎у璺猴功椤斿棙绻涢弶鎴濇倯婵炲吋鐟╁畷锝嗙節閸ャ劎鍘繝銏f硾閻楀棝鍩€椤掍緡娈樼紒顔芥瀹曞ジ寮撮悢鍝勫妇闂備胶纭跺Σ鍛村储閻e备鍋撳鐐
(1)轻质杠杆可绕O转动,在力F1作用下杠杆静止在如图1位置,图中画出F1的力臂L1和阻力F2.(2)在图2中,画出使轻质杠杆保持平衡的最小的力F的示意图(要求保留作图痕迹).(3)站在

◎ 题目
| (1)轻质杠杆可绕O转动,在力F1作用下杠杆静止在如图1位置,图中画出F1的力臂L1和阻力F2. (2)在图2中,画出使轻质杠杆保持平衡的最小的力F的示意图(要求保留作图痕迹). (3)站在地面上的人想用尽可能小的力提升水桶.请在图3中画出滑轮组绳子的绕法.  |
◎ 答案
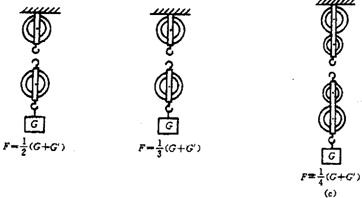
| (1)做力F1的延长线,过支点O做力F1作用线的垂线段l1,则线段l1为力F1的力臂; 过力臂L2的右端,作垂直于L2的直线,与杠杆OA的交点B为力F2的作用点,方向斜向右上方,如图所示: (2)根据此杠杆的形状,从O点到此杠杆的最右端距离最大,这是最长的力臂.所以力作用在杠杆的最右端,根据力臂的概念确定力的方向. (3)由题意知,站在地面上的人想用尽可能小的力提升水桶.所以绳子的拉力方向应向下,所以绳子应从动滑轮绕起  |
◎ 解析
“略”◎ 知识点
专家分析,试题“(1)轻质杠杆可绕O转动,在力F1作用下杠杆静止在如图1位置,图中画出F1的力臂L1和阻力F2.(2)在图2中,画出使轻质杠杆保持平衡的最小的力F的示意图(要求保留作图痕迹).(3)站在…”主要考查了你对 【杠杆的动态平衡分析】,【力臂的画法】,【滑轮组的设计与组装】 等知识点的理解和应用能力。关于这些知识点的“档案”,你可以点击相应的链接进行查看和学习。 闂備胶鍎甸崜婵堟暜閹烘绠犻幖杈剧悼閸楁岸鏌ら崫銉︽毄闁荤喎缍婇弻娑⑩€﹂幋婵囩亪闂佺粯甯楀浠嬬嵁閺嶎偀鍋撳☉娅辨粍绂掗敂鍓х<婵°倐鍋撻柟铏悾鐑芥晸閻樻彃宓嗗┑顔矫畷顒勫几閻樼粯鈷戦悹鍥b偓宕囦紙闂佺懓鍤栭幏锟� 濠电姵顔栭崳顖滃緤閻e本宕查柟鐗堟緲妗呮繝銏f硾椤戞垹妲愰敐澶嬬厱闁斥晛鍠氬▓鏃傜磼閹绘帗鍋ラ柡灞剧洴楠炴帒鈹戦崱鏇炴瀳闂備浇妗ㄧ粈渚€鏁冮妷銉$細濠电姵鑹鹃悙濠傤渻鐎n亝鎹fい锔诲櫍濮婃椽宕ㄦ繝搴㈢暦濠电偛寮堕悧鏇㈡偩閻戣姤鍋勭紒瀣儥閸ゃ倕鈹戦埥鍡楃仴妞ゆ泦鍥х闁哄洨浼濋悷鎵冲牚閹肩补鈧尙鏆楃紓鍌欑劍椤ㄥ懘藝闂堟稓鏆﹂柟杈鹃檮閺呮悂鏌ㄩ悤鍌涘- 最新内容
- 相关内容
- 网友推荐
- 图文推荐



上一篇:如图是“测定滑轮组机械效率”的实验装置.(1)请在图中画出最省力的绕线.(2)若没有刻度尺,本实验能否正常进行,答:______(3)若测得绳子末端的拉力为O.5N,钩码重1N,钩码上升
下一篇:工人站在楼下地面上,利用如图所示的滑轮组把放在地面上的重物提升到楼上,请在图中画出滑轮组的绕绳方法.
零零教育社区:论坛热帖子
| [高考] 2022 西安电子科技大学《软件工程》大作业答案 (2022-04-25) |
| [家长教育] 孩子为什么会和父母感情疏离? (2019-07-14) |
| [教师分享] 给远方姐姐的一封信 (2018-11-07) |
| [教师分享] 伸缩门 (2018-11-07) |
| [教师分享] 回家乡 (2018-11-07) |
| [教师分享] 是风味也是人间 (2018-11-07) |
| [教师分享] 一句格言的启示 (2018-11-07) |
| [教师分享] 无规矩不成方圆 (2018-11-07) |
| [教师分享] 第十届全国教育名家论坛有感(二) (2018-11-07) |
| [教师分享] 贪玩的小狗 (2018-11-07) |

